Asbury Robotics
Richard
the Rolling Rover
Project goal:
To create a RoboMagellan
type autonomous robot capable of traversing outdoor terrain (grass,
dirt, streets, curbs, sidewalks, etc) using GPS waypoints,
dead reckoning, and obstacle detection and avoidance (ultrasonic,
laser,
ir, etc) to reach intermediate and a final destination points.
Other Links:
Build Log
Pictures (coming soon)
Videos (coming soon)
Overview
Inspiration:
While going through some old issues of Servo and Robot
Magazines, I found a couple intriguing articles about converting RC
cars to mobile robot platforms (especially the "Mobility To The Maxx"
series starting April '06 in Servo).
When I started doing some research on the web about the Servo
project, I stumbled across The
Journy Robot
by David P Anderson and Mike Hamilton. At that point, all my
old
ideas vanished, and I knew that I needed to makea Journy Robot type
platform. I stole as much of the mechanical design as
I
could from the Journy Robot project, and began my version which I am
calling "Richard the Rolling Rover" or "Richard" for short.
Challenges:
- Creating a working mobile platform from scratch
(Chassis and drive train). I know a lot about electronics and
software, but I am very much a beginner at mechanical design and motor
selection. (Again I copied as much of The
Journy Robot's mechanical design and drive system as I could).
- Power systems - Identifying which batteries to use and the
proper way to connect them..
- Sensor - Selecting, evaluating, and connecting all the
sensors into the hardware and software systems.
- GPS - Learning about GPS command structure and decoding.
- Selecting the correct onboard microprocessor and software
OS to accomplish the project goals with options for future expansion.
- Writing all the C++ application software to allow Richard
to achieve it's goals.
Procedure
1) Research and identify as many of the parts and systems that will be
needed.
* Lot's of google
searching.
* Evaluation of magazine articles (
Servo and
Robot) and robotics
books for ideas.
* Since most of it is
online, it will take time to be shipped.
3) Build the chassis and drive system.
* Measuring, cutting,
drilling, and hoping it will all fit together and work.
* Verify with simple controls (possibly a remote control).
4) Setup and integrate the on board computer.
* Operating System (OS)
identification and installation.
* Create simple programs for motor control (possibly through wifi
and/or bluetooth, or just using small movement commands).
* Connect and write software for bluetooth communication.
5) Integrate GPS.
* Understand and decode
GPS data.
* Create straight-line (zero obstacle avoidance) movement using GPS.
6) Integrate distance sensors (sonar, IR, and/or laser)
* Figure out what sensors
are needed and their placement on Richard.
* Write software to communicate with sensors.
* Modify robot pathing algorithms to adjust for sensor data.
* Create multiple real world tests to evaluate (and adjust) pathing
algorithms.
7) Integrate video (for object identification (i.e. locate an orange
cone).
* Identify camera to use.
(either usb cam or CMU-II module)
* Write object identification software.(if needed. Camera may
have some or might try vision library)
* Create application to search out and touch orange construction cones.
8) Full RoboMagellan tests
* Create
multiple RoboMagellan type courses and evaluate Richard's
performance.
* Update software as issues arise.
9) Future expansion
* (I am a little
overwhelmed right now to put anything here. Will be updated
in the future)
Parts
List
*Note: I hate when I find other projects on the
web, and they have little to
no information about what was used to make them, so here is a detailed
list of all the stuff I used (or plan on using).
Chassis:
- Traxxas E-Maxx suspension (hubs, axles, shocks,
etc) - Most
of these parts were found on Ebay
(bought as individual parts or from whole cars).
- 6x Tires and wheels - Pro-Line 40 Series MOAB tires and Velocity 6 Chrome Wheels (from Tower Hobbies)
- Bottom deck - Electrical-Grade Fiberglass Sheet (Gp03) 1/8" Thick, 12" X 24" (8549K54
from McMaster-Carr).
- Middle/top decks - Electrical-Grade Fiberglass Sheet (Gp03) 3/32" Thick, 12" X 24" (8549K53
from McMaster-Carr).
- Nylon - Nylon 6/6 Sheet 1/4" Thick, 12" X 12" (8539K15
from McMaster-Carr).
- Screws/nuts/bolts.
- Tools for cutting and drilling fiberglass, nylon, and various metals.
Drive Train:
- 2x 12V Banebot motors - Banebots 12V 263RPM 2527oz-in
Planetary Gearmotor w/RS-540 Motor (RB-Ban-31
from RobotShop).
- 4x Timing belts - Trapezoidal Tooth Urethane Timing Belt .200" Pitch, Trade Sz 210XL, 21" Outer Circle, 3/8" W (1679K136
from McMaster-Carr)
- 8x Pulleys - L and H Series Timing Belt Pulley XL-Series, Fit 1/4"& 3/8" W Belt, 1.248" OD, 16 Teeth (6495K716
from McMaster-Carr).
- 2x motor chain sprockets - Steel Finished-Bore Roller Chain Sprocket for #25 Chain, 1/4" Pitch, 12 Teeth, 3/8" Bore (2737T102
from McMaster-Carr)
- 2x drive chain sprockets - Steel Finished-Bore Roller Chain Sprocket for #25 Chain, 1/4" Pitch, 18 Teeth, 1/4" Bore (2737T119
from McMaster-Carr)
- 1x chain - Standard ANSI Roller Chain #25, Sngl Strand, 1/4" Pitch, Rollerless,.13" Dia, 2'L (6261K282
from McMaster-Carr)
- 6x 3" long 1/4" drive shafts - Miniature 303 Stainless
Steel Drive Shaft 1/4" OD, 3" Length (1257K113
from McMaster-Carr)
- 12x Bearings - Steel Ball Bearing Flanged Double Sealed for
1/4" Shaft Dia, 11/16" OD (6384K352
from McMaster-Carr)
Electronics:
Power:
- 3x Lipo Batteries - 4270mAh Poly RC High
Performance Series LiPoly Triple Cell 3S 11.1V Pack (LP-PQ-4270LP-3S
from Robot
MarketPlace)
- 5V/2A Regulator - 595-PT78HT205H 5Vout 2A Wide-Input (from Mouser Electronics)
Software:
- OS - Linux (Ubuntu 9.04)
- Drivers for selected sensors.
- Custom C++ code for motor control, sensor analysis, navagation, and communtication.
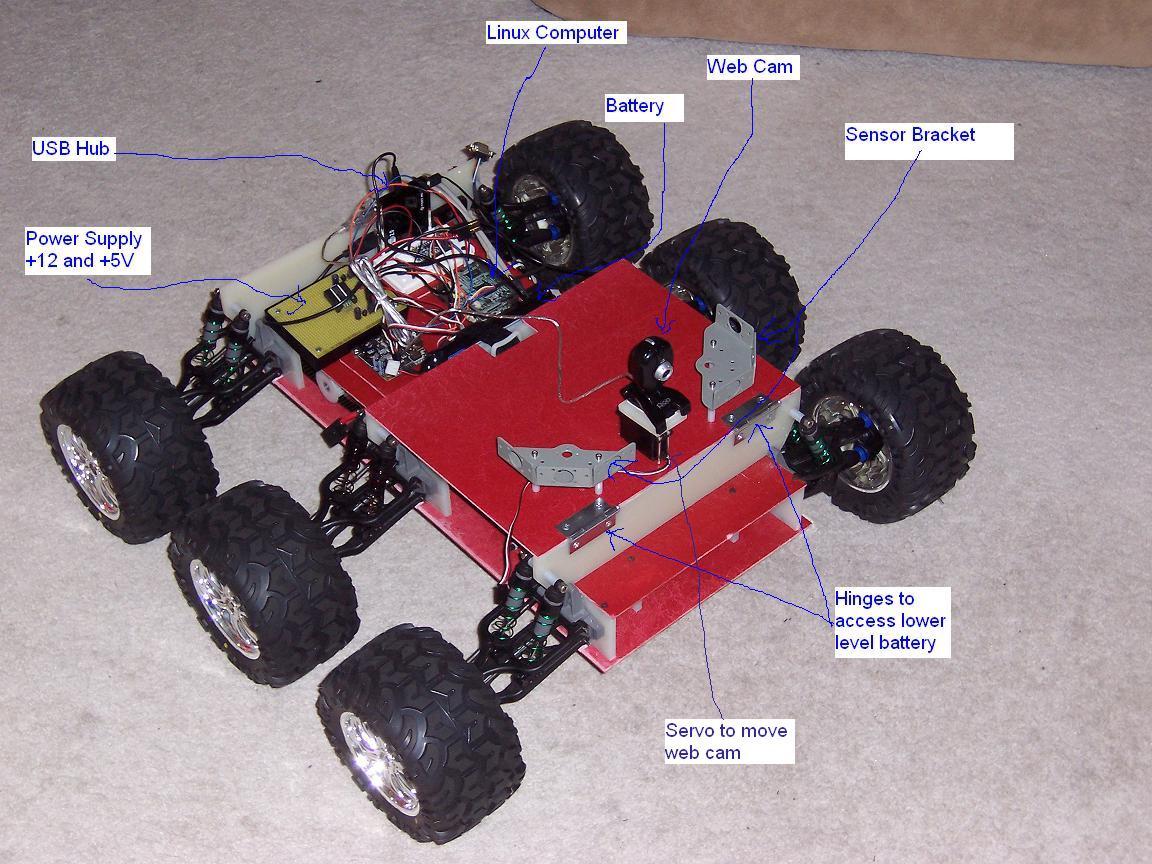
Pictures:
Progress Update
Latest pic (although out of date with current additions)